
3台続けてADAS(先進運転支援システム)調整作業
プジョー5008とルノーtwingoⅢは共に法廷点検と併せて4輪アライメント調整のご依頼を頂いております。両車はADAS(先進運転支援システム)が装備された車両の為、リヤのスラストアングルの変更により車両中心線が変化したため、先進運転支援システムのカメラやレレーダーの調整を行います。



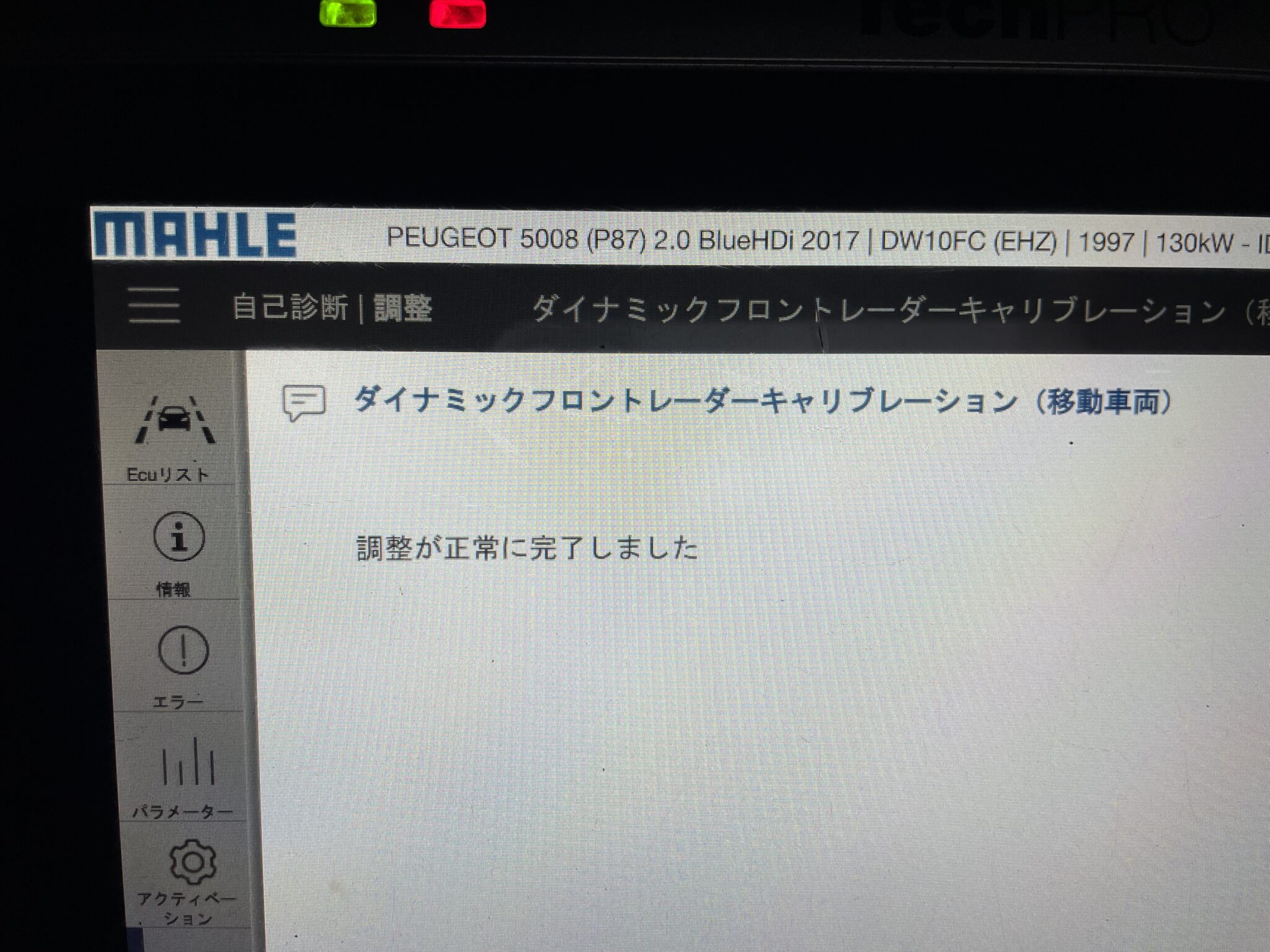
プジョー5008のカメラの調整はスタティック(静的)での調整と実走行を行いながらのダイナミック(動的)での2方法を行います。
5008はカメラの調整作業が終わり、バンパーセンター下側装着のレーダーの調整も行います。ダイナミック(動的)での調整となりますが、直線道路での一定速度での走行が必要になる為、日が暮れて道路が空いたころに行います。
2台目のtwingoの作業を開始します。このtwingoⅢについては、車高調整式サスペションにて35mmほど車高が低く、規定のカメラ位置を35mm低く設定します。
車高変化の有る車両はこの設定が肝となる所です。



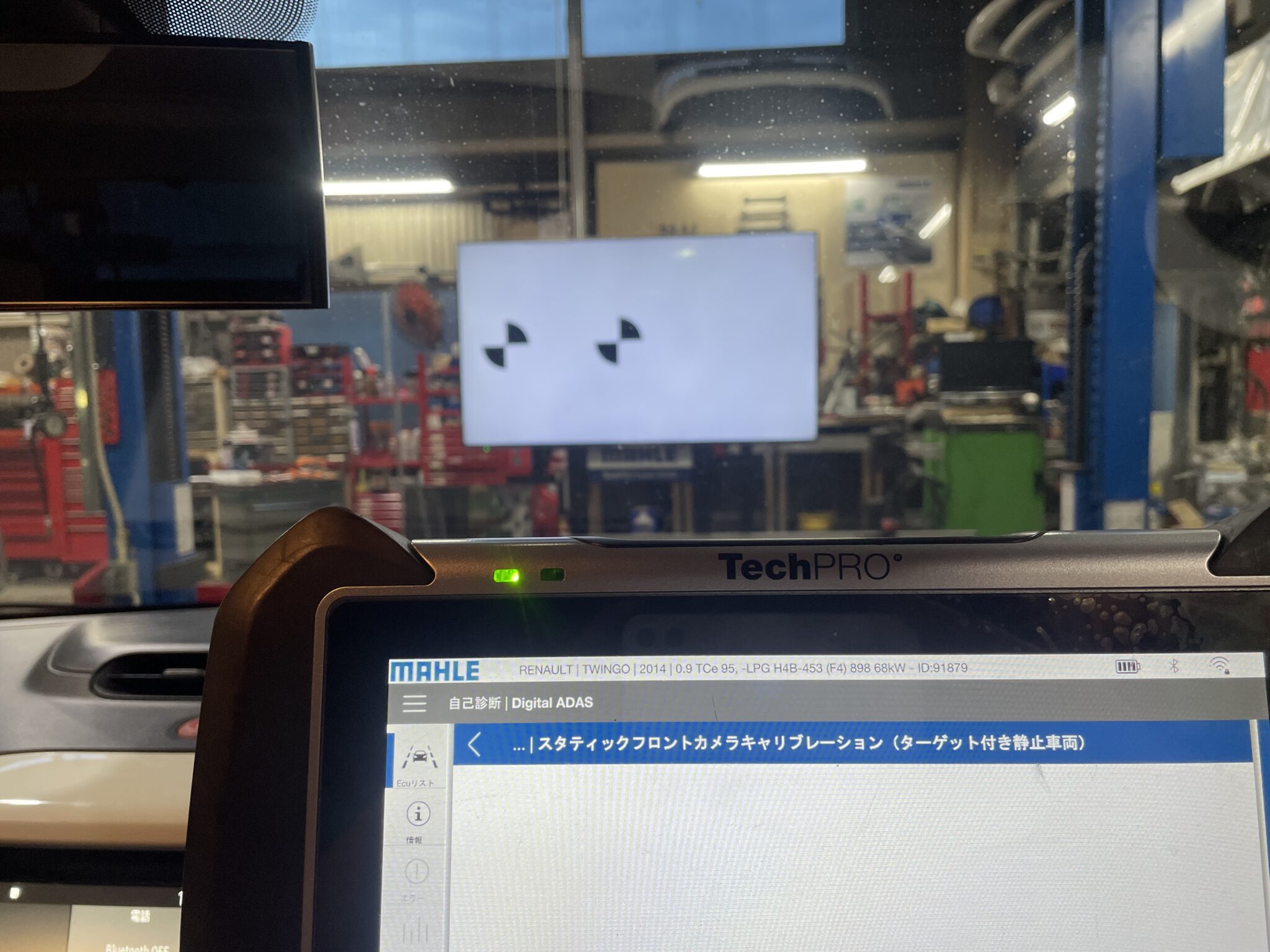

twingoはスタティック(静的)での調整のみ可能です。
本日3台目の車両は弊者社用車ディーゼルエンジンのマツダ DEMIOです。フロント廻りをアクシデントにて鈑金修理を施し、フロント外装廻りの分解を行った為、バンパー内のレーダーの調整を行います。不慣れな国産車ですが、MAHLEの診断機の指示に従い機材の設定を行いレーダー調整を行います。


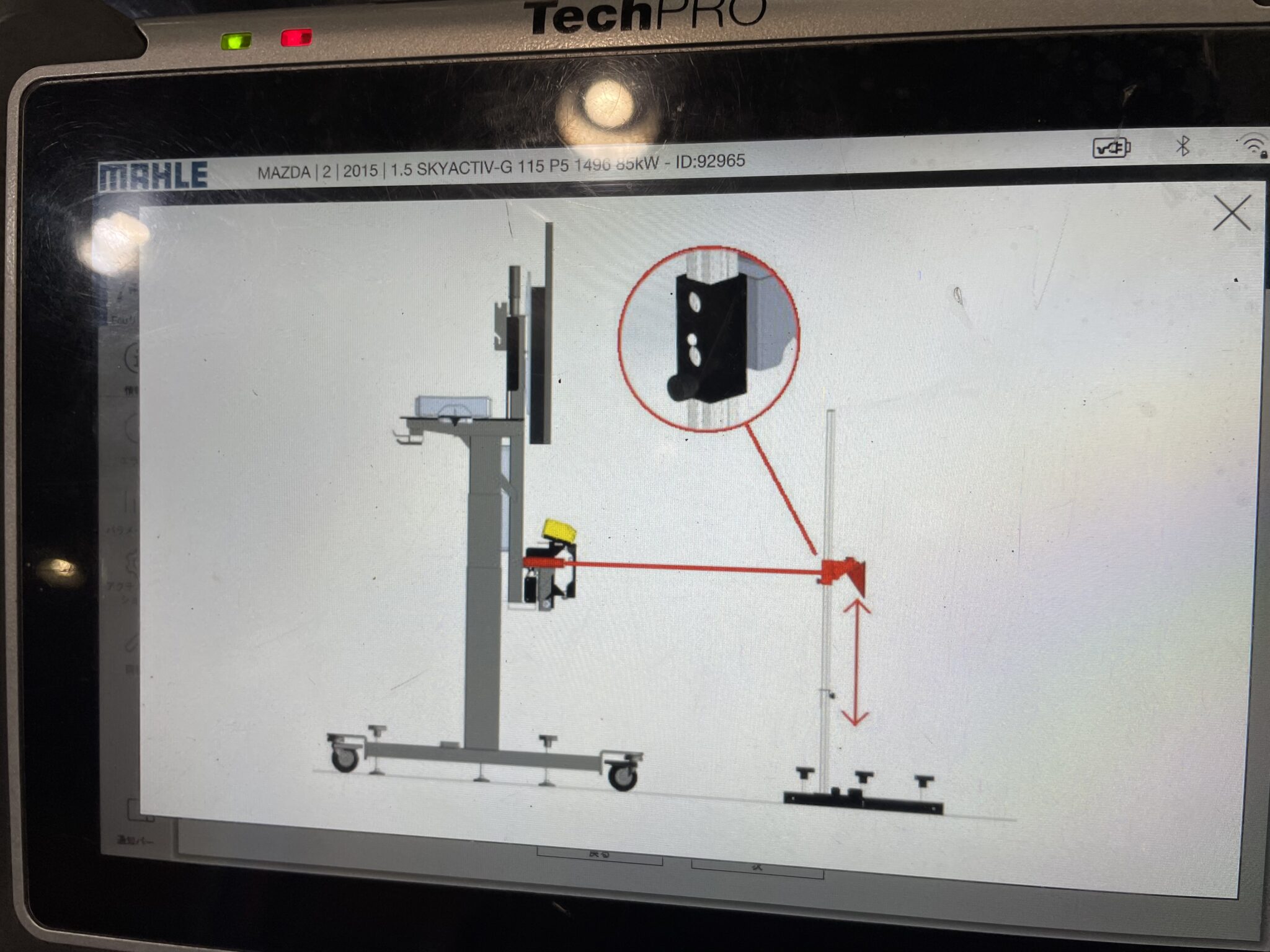
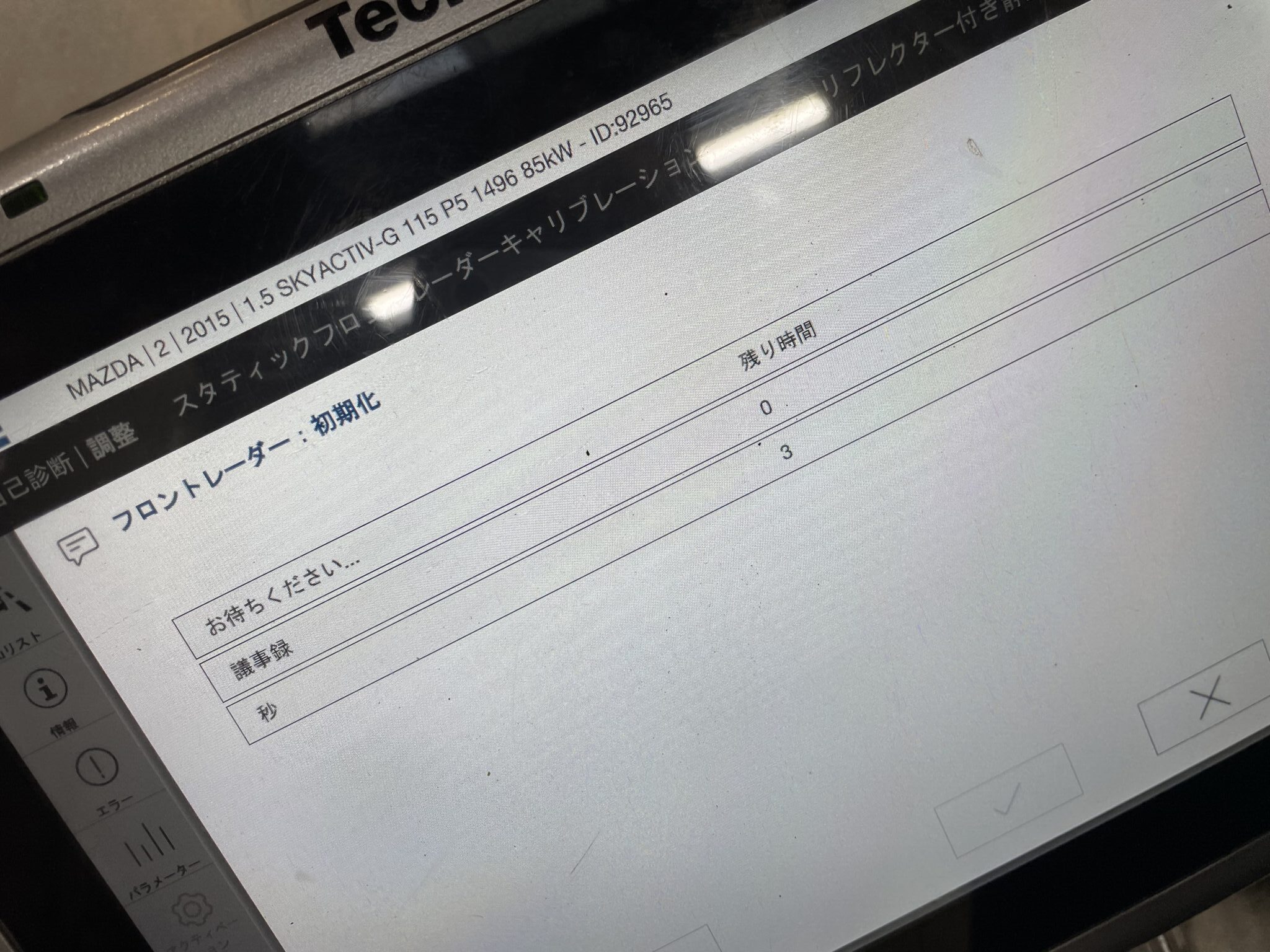
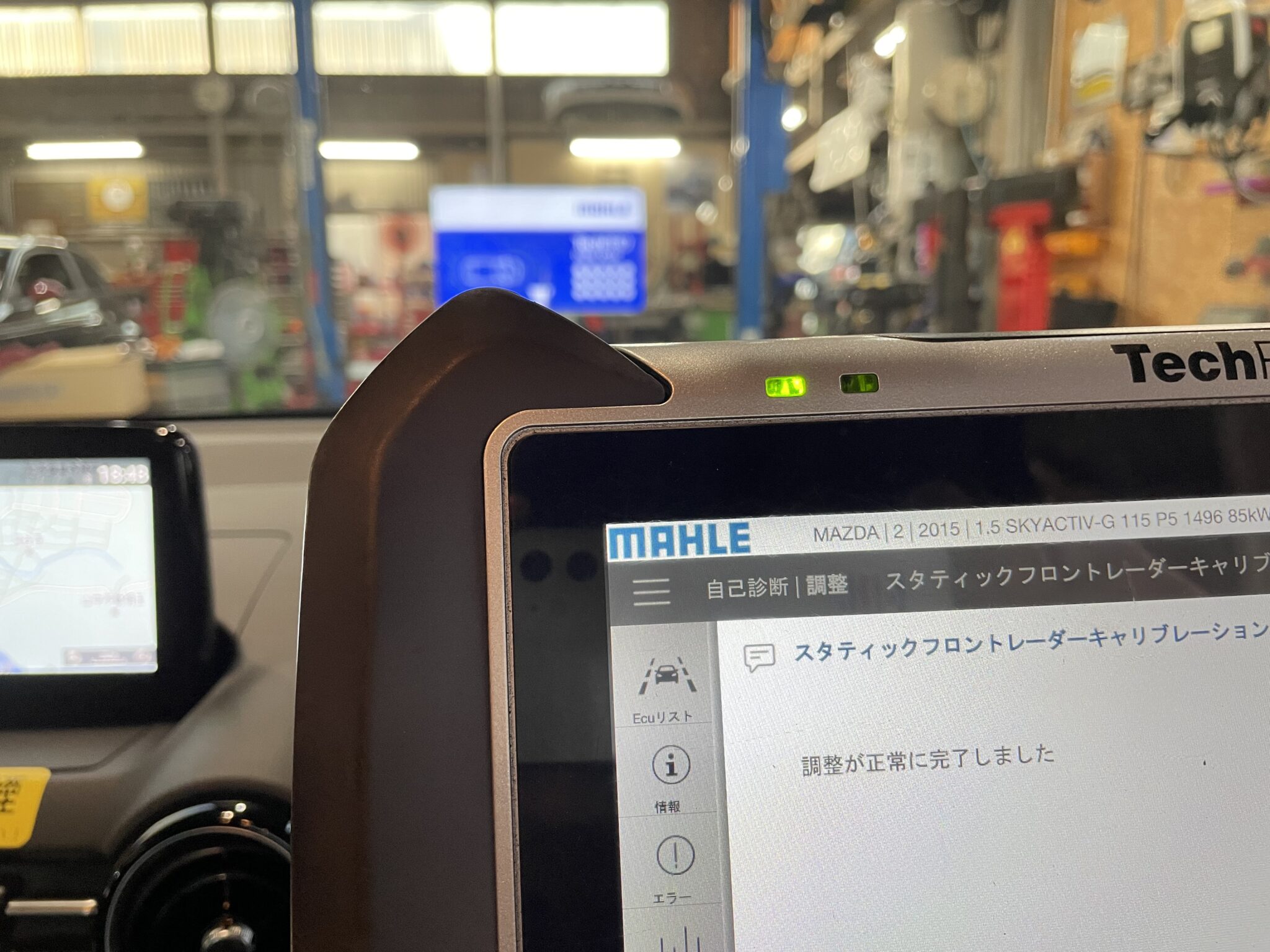
DEMIOのレーダー調整には全長10m以上スペースが必要な為、他の作業を中断してのスペース確保が必要でした。
続いて日が暮れプジョー5008のレーダーの調整に出かけます。夜の直線の長いバイパスをカングーを前方向走らせターゲットにします。診断機の指示に合わせて追従運転を診断機の指示に従い走行します。条件が揃えば、20キロほど走行して作業が完了です。先行車との車間調整が難しく大変気を使う実走行作業です。

関連記事

 ルーテシア3RS ノーマルショック+ピロアッパー
ルーテシア3RS ノーマルショック+ピロアッパー
お客様のリクエストを形にしましたルーテシア3RSは、サスペンション性能の優れた車です。 ノーマルの状態においても、モータース...
 EP6ダイレクトアルミクランクプーリーKIT
EP6ダイレクトアルミクランクプーリーKIT プジョー・シトロエンのEP6エンジン用の軽量アルミクランクプーリーです。ノーマル重量1050グ...
 フィアット・アルファ・アバルト ここ要注意!
フィアット・アルファ・アバルト ここ要注意! フィアトはファイア系エンジンの血統を継ぐエンジン31214Tや31214・31212は、この部...
 ツインエアー のクラッチ作業続き
ツインエアー のクラッチ作業続き クラッチ機構やデュアロジックの整備を進めている フィアット500...
 ルーテシア3RS 車高調 Ver.Corsa お取り付け
ルーテシア3RS 車高調 Ver.Corsa お取り付け ルーテシア3RSのサスペンションチューニングとして、定番の車高調キット「バージョン・コルサ」の...
 ランチアデルタ16Vの作業に着手
ランチアデルタ16Vの作業に着手
工具使用率の満足度は100% それがデルタですランチアデルタ16Vは、トランスミッション降ろしの作業に着手しました。 工場のレイアウトの段...
 MEGANE Ⅳ RS vs TYPE R
MEGANE Ⅳ RS vs TYPE R 発売間もないCIVIC type...
 アルファ156は F.エンブレム交換
アルファ156は F.エンブレム交換 走行距離が3万キロに満たない、大変良いコンディションのALFA156が入庫です。整備完了後に、ボデ...
 ルーテシア3RS RF4C トータルメンテナンス
ルーテシア3RS RF4C トータルメンテナンス
サスペンション関連作業タイミングベルトの交換を終え、続いては足廻りの作業に着手します。一斉に分解を行っていますので、...
 プジョー308にV-UP16とターボパイプの取り付け
プジョー308にV-UP16とターボパイプの取り付け エンジン性能を上げるアイテムは、MT車への装着が多く思われがちですが、AT車にも同様に効果的で...
 FIAT MULTIPLA レデユーサーKIT
FIAT MULTIPLA レデユーサーKIT FIAT MULTIPLA...
 パンダのパーツが揃いました
パンダのパーツが揃いました 2台のエンジン整備を進めている中、部品待ち状態であったパンダの部品が着々と揃いました。 ...